


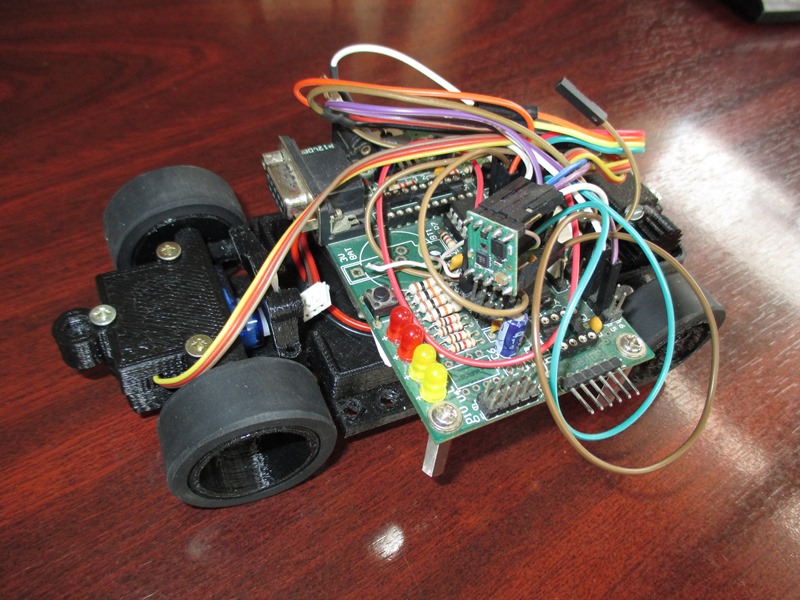
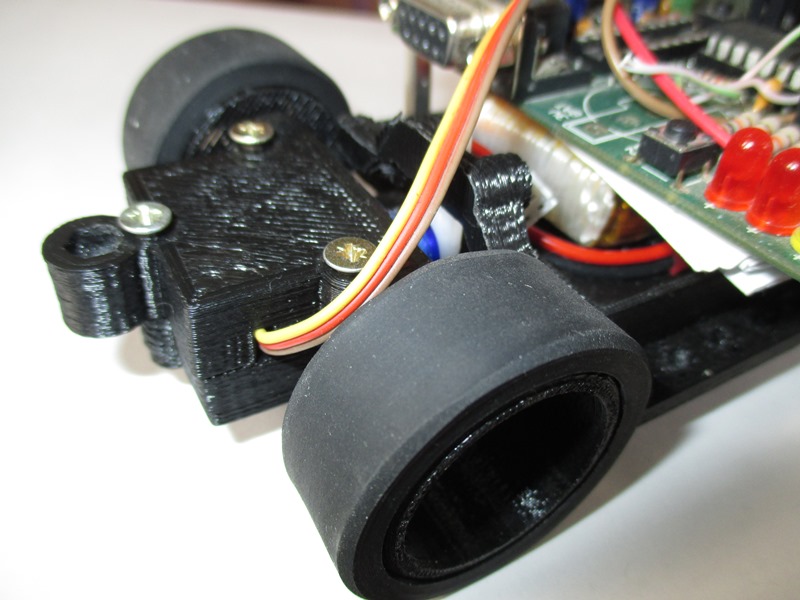
1. Maşină, vreau să fac parte dintr-un pluton de vehicule!
Descriere: Maşina este în curs de dezvoltare în cadrul unui proiect de cercetare desfăşurat la Departamentului de Automatică şi Informatică
Aplicată, proiect ce îşi propune crearea unui cadru general pentru modelarea şi controlul vehiculelor cooperante ce se
deplasează în plutoane. Maşina este controlată de o placă cu microcontroller dsPIC şi pe lângă senzorul de linie va folosi şi
senzori de tip accelerometru şi giroscopic. Comunicaţia cu calculatorul se va face prin radio. Tracţiunea şi direcţia sunt
implementate cu ajutorul unui motor de curent continuu cu perii şi respectiv un servomotor.
Indrumători: Cătălin Brăescu

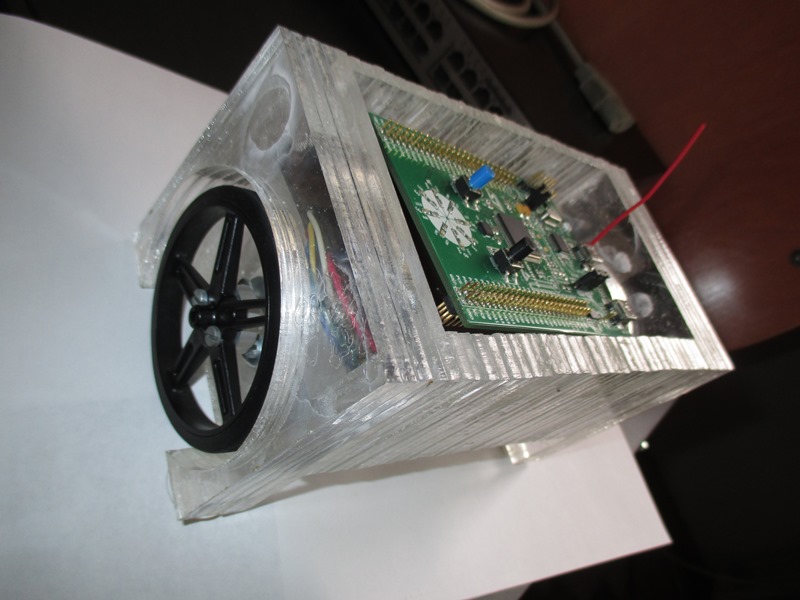
2. Robot Lego, ajutaţi-mă să-mi menţin echilibrul pe roţi!
Descriere: Proiectul presupune proiectarea şi realizarea unei structuri de reglare pentru sistemul “Robot în echilibru pe două roţi” folosind
componente LEGO Mindstorm NXT astfel încât acesta trebuie să își păstreze echilibrul pe două roți, sistemul astfel creat
reprezentând un pendul inversat. Principala componentă a robotului o reprezintă un computer numit NXT Intelligent Brick.
Acesta are încorporat un microcontroller ARM de 32 de biți. Senzorii care pot fi utilizați cu robotul Lego Mindstorms NXT pot
fi: giroscop, accelerometru, senzor cu ultrasunete, senzor de lumină, busolă, senzor tactil.
Indrumători: Cristina Budaciu


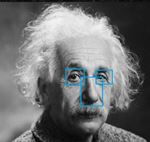
3. Program, vreau sa invat sa recunosc obiectele din imagini!
Descriere: Sistemele de achiziţie de imagini sunt tot mai răspândite în domenii ca medicina, securitate, robotică. Principala problemă rămâne
extragerea informaţiilor necesare din aceste imagini. Acest proiect va dezvolta metode pentru recunoaşterea obiectelor vizuale.
Aplicaţiile recunoaşterii de obiecte pot fi foarte diverse: robotul mobil poate învăţa să recunoască obstacole, partenerii de
joc, obiectele pe care trebuie să le transporte; sistemele de supraveghere pot diferenţia între persoane cu acces permis şi
intruşi, pot recunoaşte maşini în trafic etc. Vor fi folosiţi algoritmi de procesare a imaginilor, extragere de trăsături vizuale
şi clasificare, inclusiv bazaţi de tehnici de inteligenţă artificială. Mediul de programare va fi MATLAB. Sunt aşteptaţi studenţi
pasionaţi de programare/algoritmi şi matematică aplicată. Toate aspectele teroretice şi practice necesare (facilităţi MATLAB,
algoritmi de interes) vor fi discutate în cadrul cercului.
Indrumători: Lavinia Ferariu şi Adrian Burlacu


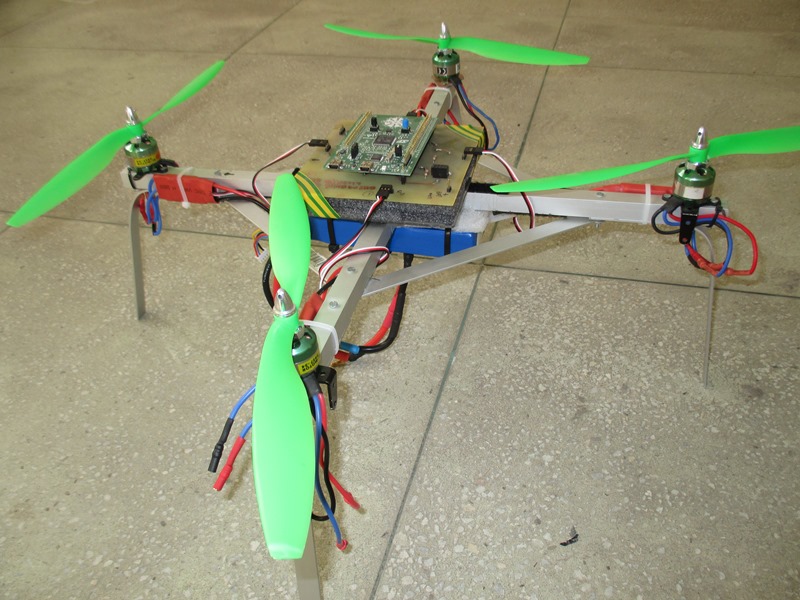
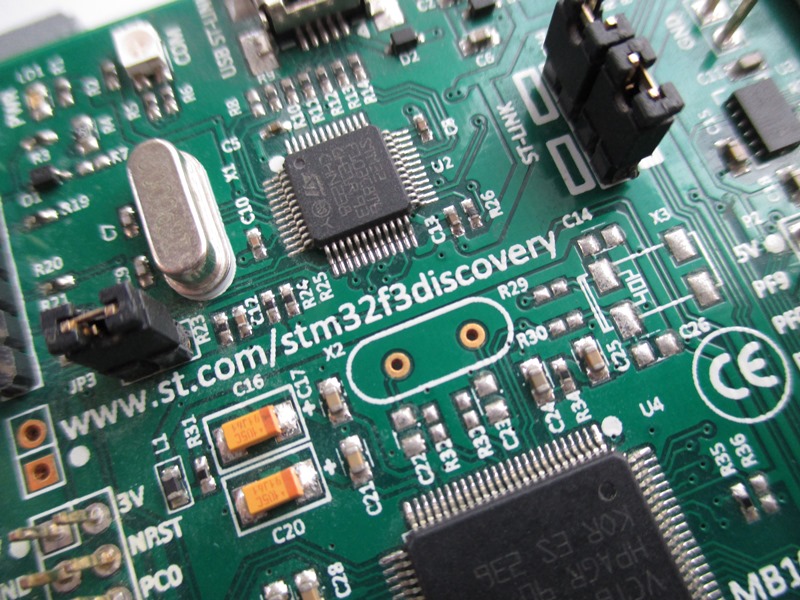
4. Quadrotor, caut o echipă de studenţi care să mă ajute să zbor la punct fix!
Descriere: Quadrotor-ul este dezvoltat în cadrul Departamentului de Automatică şi Informatică Aplicată şi este comandat de o placă
de tip STM32F3Discovery cu microcontroler cu nucleu Cortex M-4 bazat pe arhitectură ARM pe 32 de biți. Este propulsat prin
intermediul a patru motoare de tip BLDC, controlul unghiurilor quadcopter-ului realizându-se pe baza informaţiilor primite
de la senzorii de tip accelerometru, giroscop şi magnetometru de pe placa STM32F3Discovery şi prin transmiterea comenzilor
prin semnale de tip PWM către controller-ele de turație.
Indrumători: Cătălin Brăescu

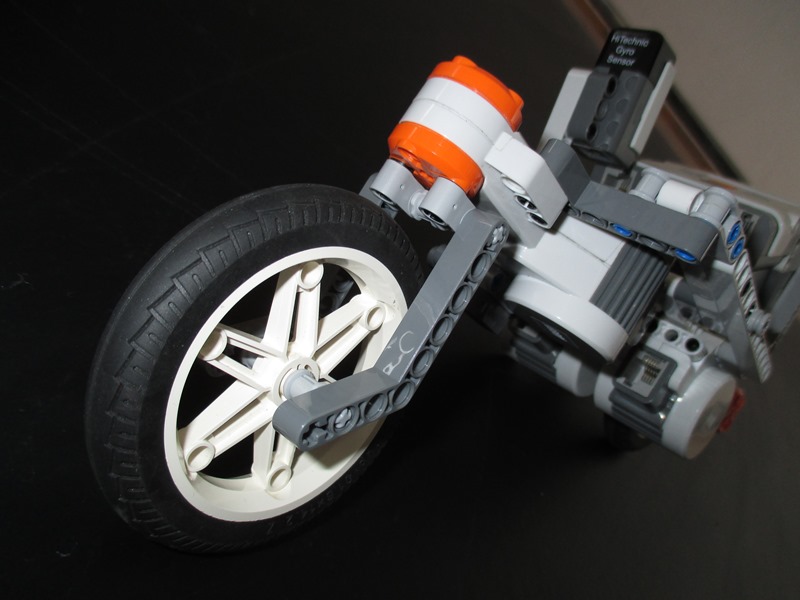
5. Motocicletă Lego doresc să parcurg un traseu comandat, folosind un joystick!
Descriere: Proiectul presupune implementarea unei strategii de reglare automată pentru un sistem de tip motocicletă, urmărind astfel
menținerea în echilibru a motocicletei. Sistemul de tip motocicletă/bicicletă este un sistem complex, care a atras atenția
oamenilor de ștință în ultimii 140 de ani. Dinamica bicicletei a fost studiată fie pentru elaborarea unor teze de masterat,
fie ca hobby sau ca studiu de caz pentru automobile.
Indrumători: Cristina Budaciu



6. Robot fotbalist, caut echipă de studenţi care să mă antreneze!
Descriere: Robotul este dezvoltat în cadrul Departamentului de Automatică şi Informatică Aplicată. În afară de senzorii de tip acceleremotru
şi giroscop, robotul este lipsit de alte elemente senzoriale, sistemul de vedere artificială fiind singurul care oferă
informaţii referitoare la mediul în care roboţii operează. Robotul este controlat de o placă de tip STM32F3Discovery cu
microcontroler cu nucleu Cortex M-4 bazat pe arhitectură ARM pe 32 de biți. Tracţiunea este realizată prin intermediul a
două motoare de curent continuu cu perii. Calculatorul implementează strategiile de joc, robotul trebuind să lovească o minge
mingea de golf de culoare portocalie. Robotul reprezintă un prototip, urmând să fie relizate două echipe de roboţi, fiecare
compusă din 3 roboţi.
Indrumători: Cătălin Brăescu



Pentru a vă înscrie/reînscrie în cercul studenţesc "Learn and Practice Automation!", completaţi
formularul de înscriere din secţiunea CONTACT.
25 noiembrie 2019:
A fost dat startul competiției ASTech Student Tournament 2020!
Puteţi găsi lista cu participantii din cele 28 de echipe aici.
4 noiembrie 2019:
Au pornit înscrierile la cea de a doua ediţie a concursului denumit "ASTech Student Tournament" (AST) desfăşurat
în colaborare cu compania ASTech. Mai multe detalii veţi găsi aici
şi pe pagina de Facebook Cercul studenţesc LPA.
24 octombrie 2019:
Studenţii ce au fost înscrişi în LPA în anul universitar 2018-2019 pot completa formularul de
feedback din secţiunea CONTACT.
25 septembrie 2019:
Cercul are asociate o pagină de Facebook (Cercul studenţesc LPA)
şi un grup de Facebook (Grupul cercului studenţesc LPA)